BA-BALLON VI

Die Westalpen aus ca. 31km Höhe
Der Start des Ballons fand
am Samstag den
10.April gegen ca. 11:45 MESZ (9:45
UTC) hinter der
Dualen Hochschule Karlsruhe statt . Die Landung in der Nähe
von Konstanz
erfolgte ziemlich genau vier Stunden später um 15:45 MESZ
(13:45
UTC). Nach einer anfänglichen
Verzögerung durch die Flugüberwachung, die sich nicht
mehr an
die bereits erteilte Startgenehmigung erinnern wollte, konnte
diese Erinnerungslücke jedoch durch ein nachgereichtes
Bestätigungsfax
schnell geschlossen werden. Unser Verfolgerteam, bestehend aus
Franz
(DJ7KL), war
bereits in der Gegend von Rottweil in Stellung gegangen. Die Nutzlast
bestand aus der Sensorik/Telemetriesonde des Studiengangs
Elektrotechnik. Diese erfasste die Positionsdaten
und die Daten einiger
mitgeführter Sensoren wie Luftdruck, Innen/Aussentemperatur
und
relative Feuchte und übermittelte dies zur Bodenstation an der
Dualen Hochschule Karlsruhe. Die Aussendungen erfolgten auf 145.225 MHz
im 2m
Amateurfunkband mit einer Sendeleistung von ca. 100mW. Verwendet wurde
dafür das Clubrufzeichen DP7X. Die
Übertragung erfolgte
sowohl als digitaler
Telemetriedatensatz als auch in regelmässigen
Abständen als
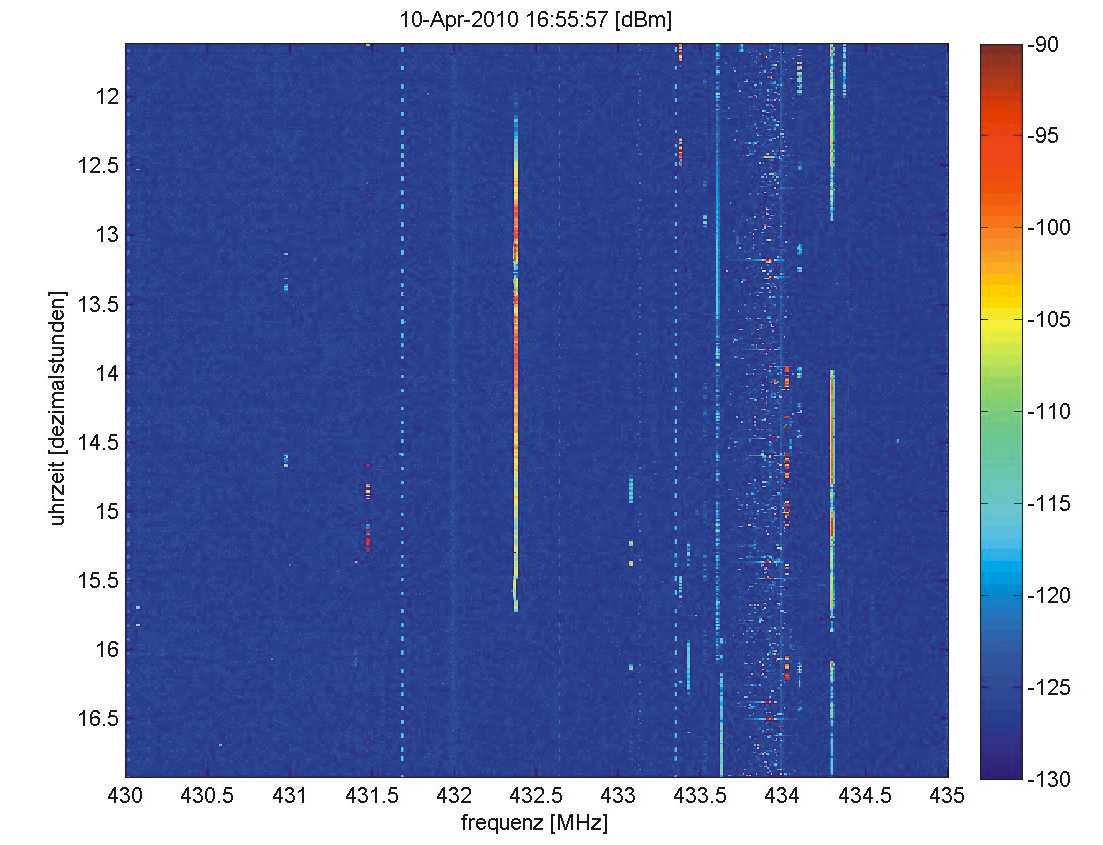
gesprochener Klartext. Ein weiterer Peil- und Bakensender auf
432.375MHz im 70cm Amateurband diente als redundantes System,
um
die spätere Auffindbarkeit bei einem
eventuellen
Ausfall des Telemetriemoduls sicher zu stellen. Die Aussendung dieses
ca.
50mW starken Signals wurde von einer automatisch aufzeichnenden
Station im Raum Schramberg mitgeschrieben. Deutlich
erkennbar ist der Feldstärkeeinbruch beim nahezu senkrechten
Überflug gegen 13:15 UTC. Schon kurz nach dem Start ab einer
Höhe von 2000m konnte
dieses Signal bis nahezu zur Landung von dort aus verfolgt
werden. Franz konnte in etwa ab demselben Zeitpunkt
die
ersten
Signale auf 2m empfangen.
Eine autark versorgte, automatisch aufzeichnende Fotokamera begleitete die Ballonfahrt. Sie ermöglichte die Aufnahme der phantastischen Fotos, die den gesamten westlichen Alpenraum aus einer Höhe von über 31km zeigen.
Dieser Teil der Ballonnutzlast befand sich im unteren Bereich der insgesamt ca. 30m langen Nutzlastschleppe. Im oberen Teil unterhalb des Bremsfallschirms wurde sie durch ein GSM-Modul mit integrierter GPS-Einheit ergänzt, das Teil der Nutzlast des Studiengangs Mechatronik war. Allerdings kann in Höhen über ca. 3000m via GSM keine verlässliche Übertragung der Positionsdaten mehr erfolgen, da GSM-Funkzellen durch horizontal bündelnde Antennen versorgt werden. Einzelne Positionsmeldungen, wie eine aus 14km Höhe über Villingen-Schwenningen, sind daher eher Zufall. Jedoch ermöglicht dieses Modul in der Regel die Lokalisierung des genauen Landeorts der Sonde, soweit am Landeplatz Empfang einer GSM-Zelle möglich ist. Im konkreten Fall war uns der Landeplatz sofort bekannt. Ein weiteres Experiment sollte den Einfluss der Einschwärzung der Styroporboxen auf den Verlauf der Innentemperatur untersuchen. Hier zeigte sich ein sehr ausgeprägter Einfluss der Schwärzung.
Die Ballonfahrt verlief zunächst nahezu direkt nach Süden bis in einer Höhe von ca. 25km in eine West/Ost-Luftströmung eingetreten wurde, die den Ballon leicht nordöstlich bis Stockach trieb. Hier wurde die Bersthöhe von ca. 31.8km erreicht. Beim folgenden Abstieg wurde zunächst eine Geschwindigkeit grösser als 200km/h erreicht, die sich dann beim Erreichen der dichteren Luftschichten am Ende vor der Landung auf ca. 11m/s verringerte. Der Abstieg war in Karlsruhe bis auf eine Höhe von 4100m durch die Telemetrie direkt verfolgbar. Die Abstiegsroute führte nach dem Wiedereintritt in die Nord/Südströmung direkt in Richtung Obersee, das Ufer wurde bei ca. 7000m Höhe überschritten. Entsprechend lagen die Nerven im Kontrollzentrum in Karlsruhe blank, da zuvor bereits eine Sonde im Bodensee ihr Ende gefunden hatte.

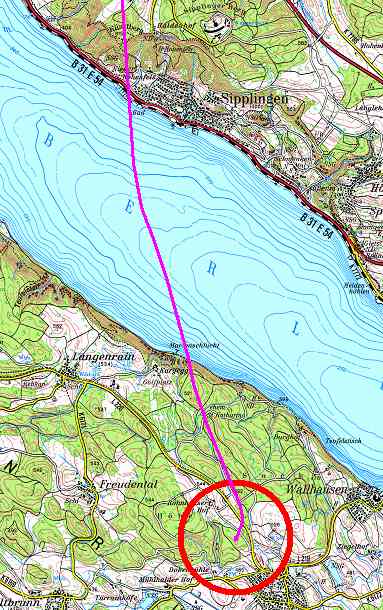
Höchstspannung bei der Landung
Besondere Beachtung fand der sanfte Knick in etwa der Mitte des Obersees, der uns nochmals den Blutdruck kräftig in die Höhe trieb. Am Ende aber landete der Ballon in einem Wäldchen, aufgrund der langen Tragleine von ca. 30m lagen die Kamera und das Telemetriemodul am Boden, der Fallschirm mit dem GSM-Modul schwebte in luftiger Höhe, konnte aber durch sanftes Rütteln zur endgültigen Landung überredet werden. Überhaupt war die Ballonverfolgung und Bergung durch unseren Ballonjäger Franz (DJ7KL) wieder professionell und ca. 20 Minuten nach dem "touch down" lag alles wohl geborgen im Kofferraum zur Heimreise bereit.

Franz (DJ7KL) mit der geborgenen Nutzlast
Die Aussendungen der Ballonsonde wurden in Europa von einer Reihe von
Empfangsstationen im DX-Cluster gemeldet, wobei die entferntesten wohl
F1USF in der Nähe von Montpellier und
G0KPW
nördlich von London in jeweils über 600km Entfernung
gewesen
sein dürften.
DH4FAJ 145225.0 DP7X jn48fl 9500m S7 1100 10 Apr 2010
DF2UQ 145225.0 DP7X jn49ia 59+ 1102 10 Apr 2010
DH4FAJ 145225.0 DP7X jn48fk 10017m -36grad 262hPa 1103 10 Apr 2010
DH4FAJ 145225.0 DP7X jn48fj 10418m -38C 245hPa S7 1106 10 Apr 2010
DH4FAJ 145225.0 DP7X jn48fi 10835m -40c 229hPa S6 1109 10 Apr 2010
DH4FAJ 145225.0 DP7X usw.... 1110 10 Apr 2010
ON6ZK 145225.0 DP7X S2 IN JO20KW 1111 10 Apr 2010
DK2GZ 145225.0 DP7X s9 in jn48gw 1112 10 Apr 2010
DL8SCQ 145225.0 DP7X 59+ 13430m high JN48FD 1127 10 Apr 2010
HB9DLI 145225.0 DP7X S 9+30, 13841m JN48FD 73 tnx 1129 10 Apr 2010
DL8SCQ 145225.0 DP7X JN48FB 14725m-34C 120hpa 1137 10 Apr 2010
DK3EE 145225.0 DP7X q5 > jo41gu 1134 10 Apr 2010
DL6SDH 145225.0 DP7X 15618masl,-31°C,104hPa,JN48F 1141 10 Apr 2010
ON6SX 145225.0 DP7X S1 in JO20hv on vertic.ant. 1154 10 Apr 2010
DL5MCG 145225.0 DP0X JN48FA - full scale in JN58k 1149 10 Apr 2010
DL8SCQ 145225.0 DP7X 16523m -29 89hpa 1148 10 Apr 2010
DL6SDH 145225.0 DP7X 15618masl,-31B0C,104hPa,JN48 1144 10 Apr 2010
IK1EGC 145225.0 DP7X hrd in jn35uf QTF 30deg 1200 10 Apr 2010
DL3LFA 145525.0 DP7X jn47<tr>jn67 59!!!.......... 1214 10 Apr 2010
DL8SCQ 145225.0 DP7X JN47FU 22389m -17C 32hpa 1223 10 Apr 2010
F1ISM 145225.0 DP7X 55 in JN09VK 1228 10 Apr 2010
F1USF 145225.0 DP7X 53 in jn23cn 1233 10 Apr 2010
DL6SDH 145225.0 DP7X 25070magl,-8Cels.,20hPa,JN47 1239 10 Apr 2010
I3MEK 145225.0 DP7X jn55sj<tr>jn47fu 58 1238 10 Apr 2010
DL6SDH 145225.0 DP7X 26662magl,-6Cels.,14hPa,JN47 1245 10 Apr 2010
DL6SDH 145225.0 DP7X 28827magl,-2Cels.,9hPa,JN47H 1257 10 Apr 2010
G0KPW 145225.0 DP7X 53 in JO02rf 1304 10 Apr 2010
DL6SDH 145225.0 DP7X 30116magl,+2Cels.,7hPa,JN47I 1306 10 Apr 2010
DL8SCQ 145225.0 DP7X Now JN47LU 31415m 11C 6hpa 1318 10 Apr 2010
DG3XA 145225.0 DP7X sometimes S9, JO43WJ 1323 10 Apr 2010
DL8NP 144425.0 DP7X lost in noise at 1343z 1342 10 Apr 2010
Hier noch einige interessante Temperaturmesswerte, insbesondere der
Temperaturverlauf innerhalb der Sonde hat uns bei
den
bisherigen Missionen stets positiv überrascht. Sind wir bei
den
ersten Überlegungen noch von extremen Temperaturen
ausgegangen,
denen die Batterien und die Elektronik ausgesetzt sein sollten, so
zeigte sich stets, dass dies kein Problem darstellt. Obgleich die
Aussentemperaturen bei ca. 12km Höhe durchaus minus
50°C erreichen, sanken die Temperaturen im Inneren gemessen an
der
Batterie nie unter minus 3°C. Beim weiteren Aufstieg
steigen
diese dann wieder an, was wahrscheinlich auf verstärkte
Strahlungserwärmung zurückzuführen ist. Ob
die
Temperaturen im Aussenbereich tatsächlich ins Positive
wechseln,
ist nicht geklärt. Die Vermutung liegt aber nahe, dass es sich
um
eine Strahlungskopplung handelt und bei den nächsten Versuchen
eine noch bessere Entkopplung und Belüftung des
äusseren
Temperatursensors von der hier sehr intensiven Sonneneinstrahlung
vorgenommen werden muss. Die Tendenz ist aber eindeutig, bei
einigermassen sorgfältiger Isolierung ist das
Temperaturproblem
beherrschbar.

Temperaturverläufe Innen/Aussenbereich
Das folgende Diagramm zeigt den Temperaturverlauf der beiden Temperatursensoren, die in zwei identischen Styroporboxen untergebracht waren, von denen eine jedoch äusserlich geschwärzt war. Deutlich erkennt man den Einfluss der Schwärzung auf den Temperaturverlauf. Die Erwärmung durch den Strahlungseintrag ist deutlich ab Höhen größer 12km erkennbar.

Temperaturverläufe der beiden separat in weiss/schwarz Styroporboxen gehäusten Temperatursensoren
Die Ballonsonde besteht zur Zeit aus fünf Hardwaremodulen, die mit Steckverbindern verbunden sind. Die zentrale Steuerung übernimmt eine Mikrocomputerplatine. An diese angeschlossen sind das 2m-Sendemodul, das Sprachausgabemodul und das GPS-Modul. Ergänzt wird das ganze durch die Spannungsversorgung.
Die Spannungsversorgung mit den notwendigen Spannungen von 9V, 5V und 3,3V wird durch getaktete Abwärtswandler realisiert. Dies hat den Vorteil der optimalen Ausnutzung der vorhandenen Batteriekapazität. Die maximale Eingangsspannung dieses Moduls beträgt 70V, eine Kapizitätserweiterung der Energieversorgung kann so durch einfache Serienschaltung entsprechend vieler Lithiumtrockenzellen erfolgen. Aktuell verwenden wir je Mission drei Packs Lithiumzellen zu je 6V aus dem Fotobereich, dies sind 18V Betriebsspannung bei Zimmertemperatur und im vollen Zustand, die dann nach ca. 4h Betriebsdauer und ca. 0°C Batterietemperatur nicht unter 16V sinkt. Die mittlere Stromaufnahme des gesamten Systems inklusive der 70cm Bake beträgt bei dieser Spannung deutlich weniger als 100mA. Versuche im Vorfeld haben bei einer Batterietemperatur minus 20°C bei 100mA eine Betriebsdauer mit den von uns verwendeten Batterietyp von mehr als 8h ergeben.
Das verwendete GPS Modul ist ein uBlox und ist bei korrekter Parametrierung bisher noch nie ausgefallen. Vielleicht ein Hinweis, der Kopfzerbrechen ersparen kann: man sollte die verwendeten dielektrischen Patchantennen nicht in der Styroporbox unterbringen. Styropor ist zwar ein sehr verlustarmes Material, es zeigte sich aber, dass die Empfangsleistung deutlich nach dem Einbau der Antenne in die Box litt. Wir hegen die Vermutung, dass es durch die dielektrischen Eigenschaften des Styropors zu einer Verstimmung der Antenne kommen kann, mit der Folge einer Verschlechterung des Signal - zu Rauschverhältnisses
Desweiteren muss der Betriebsmodus so umgestellt werden, dass ein Betrieb über 12000m Höhe gewährleistet ist, mit der Standardparametrierung fällt das System bei ca. 12km Höhe aus.
Das Board verfügt über einen 12Bit A/D-Wandler und kann die Messergebnisse von bis zu zwölf analogen Datenkanälen aufnehmen. Digitale Ein/Ausgänge können zur Steuerung externer Komponenten verwendet werden.
Der eingesetzte Drucksensor kann bis zu Drücken deutlich unter 100mBar eingesetzt werden und ist daher den Motorola Drucksensoren, die bei ca. 100mBar bereits in die Sättigung gehen, deutlich überlegen. Die Temperatursensoren erfassen einen Bereich von -55°C bis +100°C.
Der Sender ist ein einfacher PLL- Vervielfacher, der einen quarzgesteuerten Oszillator verachtfacht. Es folgt eine kleine Verstärkerstufe, die das Signal auf ca. 100mW anhebt. Ein PI-Filter verhindert das Schlimmste. Diese Stufe kann abgeschaltet werden, was in etwa eine Absenkung des Ausgabngspegels um 19dB bewirkt. Das reine Oszillatorsignal von ca. 1mW war die meiste Zeit am Empfangsort in Karlsruhe ebenfalls rauschfrei aufnehmbar.
Die Antenne an der Ballonsonde ist eine einfache J-Antenne.
Hier ein paar Worte an die Turnstyle-Freaks. Nach einem eigenen Versuch mit einer Turnstyle-Antenne, wurde dieser unter dem Kapitel 'Wenn man immer alles nachmacht, was alle einem weissmachen wollen, wird Schwarzes auch nicht weisser' abgehakt. Hat man sich beim ersten Mal Zuhören einer Sonde mit Turnstyle-Antenne noch über die Fading Einbrüche gewundert und sich gefragt, wirds ohne noch schlimmer, war nach dem ersten Einsatz einer J-Antenne der klare Menschenverstand wieder hergestellt. Das Ergebnis: nahezu fadingfreier Empfang über die gesamte Ballonfahrt, bis auf die Turbulenzen beim beginnenden Abstieg, unmittelbar nach dem Platzen des Ballons. Die Empfangsantenne ist entsprechend eine Vertikalantenne. Dieses Mal konnte das letzte gültige Datagramm aus 4100m Höhe vom Bodensee über den Schwarzwald nach Karlsruhe mit 100mW übertragen werden. Ein senkrecht startender Ballon, der dann wieder sanft herniederschwebt, dürfte eher selten sein.
Die aktuellen Hardwaremodule haben inzwischen die zweite Ballonfahrt erfolgreich ohne Ausfall überstanden. Es wird zur Zeit darüber nachgedacht, alle Komponenten auf einer einzigen Platine zu integrieren, was die Funktionssicherheit weiter erhöhen dürfte.
Das entsprechende Gegenstück zum Empfangsdatenserver ist ein Clientprogramm, das sich beim Server anmeldet und von dort die Empfangsdaten erhält. Die Messwerte werden dann in einem übersichtlichen Fenster dargestellt. Die NMEA Daten werden separiert und können über eine serielle Schnittstelle einem Kartenprogramm angeboten werden, das die Fahrt live in einem Kartenfenster darstellt (z. B. TOP50) oder Google Earth. Für dieses Interface nimmt man idealererweise eine virtuelle Comport Emulation wie z. B. von Etherlogic.
Der Vorteil dieser Client/Server Konfiguration ist, Ort der Empfangsanlage muss nicht Ort der Darstellung und Präsentation des Missionsverlaufs (Kontrollzentrum) sein. So kann eine beliebige günstig gelegene Station zum Empfang der Ballonmission verwendet werden, solange sie über einen Internetanschluss verfügt, mehr noch, es könnten beliebig viele Stationen zum Empfang eingesetzt werden und im Kontrollzentrum alle Empfangsdaten zusammenlaufen.
Diese Idee weiterverfolgt, ermöglicht die automatische Darstellung aller Empfangsstationen auf einer Europakarte, die den Ballon aufnehmen können, die dann im Internet für jedermann abrufbar sein sollte. Dies setzt voraus, dass dieses Programm öffentlich zugänglich gemacht wird und die Anwender den entsprechenden Port in ihrem Netzwerk freizugeben haben.
Wir werden diese interessante Möglichkeit in einer der nächsten Missionen ankündigen und vorbereiten.
{kind=link}
Eine autark versorgte, automatisch aufzeichnende Fotokamera begleitete die Ballonfahrt. Sie ermöglichte die Aufnahme der phantastischen Fotos, die den gesamten westlichen Alpenraum aus einer Höhe von über 31km zeigen.
Dieser Teil der Ballonnutzlast befand sich im unteren Bereich der insgesamt ca. 30m langen Nutzlastschleppe. Im oberen Teil unterhalb des Bremsfallschirms wurde sie durch ein GSM-Modul mit integrierter GPS-Einheit ergänzt, das Teil der Nutzlast des Studiengangs Mechatronik war. Allerdings kann in Höhen über ca. 3000m via GSM keine verlässliche Übertragung der Positionsdaten mehr erfolgen, da GSM-Funkzellen durch horizontal bündelnde Antennen versorgt werden. Einzelne Positionsmeldungen, wie eine aus 14km Höhe über Villingen-Schwenningen, sind daher eher Zufall. Jedoch ermöglicht dieses Modul in der Regel die Lokalisierung des genauen Landeorts der Sonde, soweit am Landeplatz Empfang einer GSM-Zelle möglich ist. Im konkreten Fall war uns der Landeplatz sofort bekannt. Ein weiteres Experiment sollte den Einfluss der Einschwärzung der Styroporboxen auf den Verlauf der Innentemperatur untersuchen. Hier zeigte sich ein sehr ausgeprägter Einfluss der Schwärzung.
Die Ballonfahrt verlief zunächst nahezu direkt nach Süden bis in einer Höhe von ca. 25km in eine West/Ost-Luftströmung eingetreten wurde, die den Ballon leicht nordöstlich bis Stockach trieb. Hier wurde die Bersthöhe von ca. 31.8km erreicht. Beim folgenden Abstieg wurde zunächst eine Geschwindigkeit grösser als 200km/h erreicht, die sich dann beim Erreichen der dichteren Luftschichten am Ende vor der Landung auf ca. 11m/s verringerte. Der Abstieg war in Karlsruhe bis auf eine Höhe von 4100m durch die Telemetrie direkt verfolgbar. Die Abstiegsroute führte nach dem Wiedereintritt in die Nord/Südströmung direkt in Richtung Obersee, das Ufer wurde bei ca. 7000m Höhe überschritten. Entsprechend lagen die Nerven im Kontrollzentrum in Karlsruhe blank, da zuvor bereits eine Sonde im Bodensee ihr Ende gefunden hatte.
Höchstspannung bei der Landung
Besondere Beachtung fand der sanfte Knick in etwa der Mitte des Obersees, der uns nochmals den Blutdruck kräftig in die Höhe trieb. Am Ende aber landete der Ballon in einem Wäldchen, aufgrund der langen Tragleine von ca. 30m lagen die Kamera und das Telemetriemodul am Boden, der Fallschirm mit dem GSM-Modul schwebte in luftiger Höhe, konnte aber durch sanftes Rütteln zur endgültigen Landung überredet werden. Überhaupt war die Ballonverfolgung und Bergung durch unseren Ballonjäger Franz (DJ7KL) wieder professionell und ca. 20 Minuten nach dem "touch down" lag alles wohl geborgen im Kofferraum zur Heimreise bereit.
Franz (DJ7KL) mit der geborgenen Nutzlast
DH4FAJ 145225.0 DP7X jn48fl 9500m S7 1100 10 Apr 2010
DF2UQ 145225.0 DP7X jn49ia 59+ 1102 10 Apr 2010
DH4FAJ 145225.0 DP7X jn48fk 10017m -36grad 262hPa 1103 10 Apr 2010
DH4FAJ 145225.0 DP7X jn48fj 10418m -38C 245hPa S7 1106 10 Apr 2010
DH4FAJ 145225.0 DP7X jn48fi 10835m -40c 229hPa S6 1109 10 Apr 2010
DH4FAJ 145225.0 DP7X usw.... 1110 10 Apr 2010
ON6ZK 145225.0 DP7X S2 IN JO20KW 1111 10 Apr 2010
DK2GZ 145225.0 DP7X s9 in jn48gw 1112 10 Apr 2010
DL8SCQ 145225.0 DP7X 59+ 13430m high JN48FD 1127 10 Apr 2010
HB9DLI 145225.0 DP7X S 9+30, 13841m JN48FD 73 tnx 1129 10 Apr 2010
DL8SCQ 145225.0 DP7X JN48FB 14725m-34C 120hpa 1137 10 Apr 2010
DK3EE 145225.0 DP7X q5 > jo41gu 1134 10 Apr 2010
DL6SDH 145225.0 DP7X 15618masl,-31°C,104hPa,JN48F 1141 10 Apr 2010
ON6SX 145225.0 DP7X S1 in JO20hv on vertic.ant. 1154 10 Apr 2010
DL5MCG 145225.0 DP0X JN48FA - full scale in JN58k 1149 10 Apr 2010
DL8SCQ 145225.0 DP7X 16523m -29 89hpa 1148 10 Apr 2010
DL6SDH 145225.0 DP7X 15618masl,-31B0C,104hPa,JN48 1144 10 Apr 2010
IK1EGC 145225.0 DP7X hrd in jn35uf QTF 30deg 1200 10 Apr 2010
DL3LFA 145525.0 DP7X jn47<tr>jn67 59!!!.......... 1214 10 Apr 2010
DL8SCQ 145225.0 DP7X JN47FU 22389m -17C 32hpa 1223 10 Apr 2010
F1ISM 145225.0 DP7X 55 in JN09VK 1228 10 Apr 2010
F1USF 145225.0 DP7X 53 in jn23cn 1233 10 Apr 2010
DL6SDH 145225.0 DP7X 25070magl,-8Cels.,20hPa,JN47 1239 10 Apr 2010
I3MEK 145225.0 DP7X jn55sj<tr>jn47fu 58 1238 10 Apr 2010
DL6SDH 145225.0 DP7X 26662magl,-6Cels.,14hPa,JN47 1245 10 Apr 2010
DL6SDH 145225.0 DP7X 28827magl,-2Cels.,9hPa,JN47H 1257 10 Apr 2010
G0KPW 145225.0 DP7X 53 in JO02rf 1304 10 Apr 2010
DL6SDH 145225.0 DP7X 30116magl,+2Cels.,7hPa,JN47I 1306 10 Apr 2010
DL8SCQ 145225.0 DP7X Now JN47LU 31415m 11C 6hpa 1318 10 Apr 2010
DG3XA 145225.0 DP7X sometimes S9, JO43WJ 1323 10 Apr 2010
DL8NP 144425.0 DP7X lost in noise at 1343z 1342 10 Apr 2010
Temperaturverläufe Innen/Aussenbereich
Das folgende Diagramm zeigt den Temperaturverlauf der beiden Temperatursensoren, die in zwei identischen Styroporboxen untergebracht waren, von denen eine jedoch äusserlich geschwärzt war. Deutlich erkennt man den Einfluss der Schwärzung auf den Temperaturverlauf. Die Erwärmung durch den Strahlungseintrag ist deutlich ab Höhen größer 12km erkennbar.
Temperaturverläufe der beiden separat in weiss/schwarz Styroporboxen gehäusten Temperatursensoren
Einige technische Details der Ballonsonde
Die Ballonsonde besteht zur Zeit aus fünf Hardwaremodulen, die mit Steckverbindern verbunden sind. Die zentrale Steuerung übernimmt eine Mikrocomputerplatine. An diese angeschlossen sind das 2m-Sendemodul, das Sprachausgabemodul und das GPS-Modul. Ergänzt wird das ganze durch die Spannungsversorgung.
Spannungsversorgung
Die Spannungsversorgung mit den notwendigen Spannungen von 9V, 5V und 3,3V wird durch getaktete Abwärtswandler realisiert. Dies hat den Vorteil der optimalen Ausnutzung der vorhandenen Batteriekapazität. Die maximale Eingangsspannung dieses Moduls beträgt 70V, eine Kapizitätserweiterung der Energieversorgung kann so durch einfache Serienschaltung entsprechend vieler Lithiumtrockenzellen erfolgen. Aktuell verwenden wir je Mission drei Packs Lithiumzellen zu je 6V aus dem Fotobereich, dies sind 18V Betriebsspannung bei Zimmertemperatur und im vollen Zustand, die dann nach ca. 4h Betriebsdauer und ca. 0°C Batterietemperatur nicht unter 16V sinkt. Die mittlere Stromaufnahme des gesamten Systems inklusive der 70cm Bake beträgt bei dieser Spannung deutlich weniger als 100mA. Versuche im Vorfeld haben bei einer Batterietemperatur minus 20°C bei 100mA eine Betriebsdauer mit den von uns verwendeten Batterietyp von mehr als 8h ergeben.
GPS-Modul
Das verwendete GPS Modul ist ein uBlox und ist bei korrekter Parametrierung bisher noch nie ausgefallen. Vielleicht ein Hinweis, der Kopfzerbrechen ersparen kann: man sollte die verwendeten dielektrischen Patchantennen nicht in der Styroporbox unterbringen. Styropor ist zwar ein sehr verlustarmes Material, es zeigte sich aber, dass die Empfangsleistung deutlich nach dem Einbau der Antenne in die Box litt. Wir hegen die Vermutung, dass es durch die dielektrischen Eigenschaften des Styropors zu einer Verstimmung der Antenne kommen kann, mit der Folge einer Verschlechterung des Signal - zu Rauschverhältnisses
Desweiteren muss der Betriebsmodus so umgestellt werden, dass ein Betrieb über 12000m Höhe gewährleistet ist, mit der Standardparametrierung fällt das System bei ca. 12km Höhe aus.
Sprachausgabe
Dieses Modul dient der Ausgabe von Messwerten oder Betriebsparametern in gesprochenem Klartext. Es ist zur Zeit noch ein separates Modul. Die Integration auf die Zentrale Steuereinheit ist in Vorbereitung und wird zur weiteren Gewichts- und Stromeinsparung führen.Zentrale Steuereinheit und Sensorik
Sie bildet den Kern des Systems und steuert die Datenerfassung aus den Hilfsmodulen und angeschlossenen Sensoren. Sie generiert den Telemetriedatensatz und erzeugt das frequenzgetastete Modulationssignal für den Telemetriesender. Der Telemetriedatensatz besteht aus einem NMEA-Datensatz aus dem GPS-Modul, angehängt werden können beliebig viele Sensordaten. Eine CRC16 Prüfsumme dient der Überprüfung der Datenintegrität auf der Empfangsseite. Die Datenrate beträgt 1200 Baud. Es wird jeweils alle 5s ein Telemetriedatensatz übertragen, jede Minute erfolgt z. Z. eine Sprachausgabe der Daten. Das Modul kann auf einem internen EEPROM-Speicher eine komplette 6 stündige Mission mitspeichern.Das Board verfügt über einen 12Bit A/D-Wandler und kann die Messergebnisse von bis zu zwölf analogen Datenkanälen aufnehmen. Digitale Ein/Ausgänge können zur Steuerung externer Komponenten verwendet werden.
Der eingesetzte Drucksensor kann bis zu Drücken deutlich unter 100mBar eingesetzt werden und ist daher den Motorola Drucksensoren, die bei ca. 100mBar bereits in die Sättigung gehen, deutlich überlegen. Die Temperatursensoren erfassen einen Bereich von -55°C bis +100°C.
Telemetriesender
Der Sender ist ein einfacher PLL- Vervielfacher, der einen quarzgesteuerten Oszillator verachtfacht. Es folgt eine kleine Verstärkerstufe, die das Signal auf ca. 100mW anhebt. Ein PI-Filter verhindert das Schlimmste. Diese Stufe kann abgeschaltet werden, was in etwa eine Absenkung des Ausgabngspegels um 19dB bewirkt. Das reine Oszillatorsignal von ca. 1mW war die meiste Zeit am Empfangsort in Karlsruhe ebenfalls rauschfrei aufnehmbar.
Die Antenne an der Ballonsonde ist eine einfache J-Antenne.
Hier ein paar Worte an die Turnstyle-Freaks. Nach einem eigenen Versuch mit einer Turnstyle-Antenne, wurde dieser unter dem Kapitel 'Wenn man immer alles nachmacht, was alle einem weissmachen wollen, wird Schwarzes auch nicht weisser' abgehakt. Hat man sich beim ersten Mal Zuhören einer Sonde mit Turnstyle-Antenne noch über die Fading Einbrüche gewundert und sich gefragt, wirds ohne noch schlimmer, war nach dem ersten Einsatz einer J-Antenne der klare Menschenverstand wieder hergestellt. Das Ergebnis: nahezu fadingfreier Empfang über die gesamte Ballonfahrt, bis auf die Turbulenzen beim beginnenden Abstieg, unmittelbar nach dem Platzen des Ballons. Die Empfangsantenne ist entsprechend eine Vertikalantenne. Dieses Mal konnte das letzte gültige Datagramm aus 4100m Höhe vom Bodensee über den Schwarzwald nach Karlsruhe mit 100mW übertragen werden. Ein senkrecht startender Ballon, der dann wieder sanft herniederschwebt, dürfte eher selten sein.
Die aktuellen Hardwaremodule haben inzwischen die zweite Ballonfahrt erfolgreich ohne Ausfall überstanden. Es wird zur Zeit darüber nachgedacht, alle Komponenten auf einer einzigen Platine zu integrieren, was die Funktionssicherheit weiter erhöhen dürfte.
Software
Das Empfangsprogramm (FSKDEMOD) demoduliert und dekodiert den Telemetriedatensatz aus dem Audioempfangssignal, überprüft die CRC16 Checksumme und stellt eine Serverfunktion zur Verfügung, die die empfangenen und dekodierten Daten über eine TCP/IP Schnittstelle im WEB abrufbar macht. Zusätzlich wird eine Webseite aktualisiert, die die aktuelle Ballonposition mittels Google Maps darstellt. Diese kann durch einen Webserber im WEB sofort zur Verfügung gestellt werden.Das entsprechende Gegenstück zum Empfangsdatenserver ist ein Clientprogramm, das sich beim Server anmeldet und von dort die Empfangsdaten erhält. Die Messwerte werden dann in einem übersichtlichen Fenster dargestellt. Die NMEA Daten werden separiert und können über eine serielle Schnittstelle einem Kartenprogramm angeboten werden, das die Fahrt live in einem Kartenfenster darstellt (z. B. TOP50) oder Google Earth. Für dieses Interface nimmt man idealererweise eine virtuelle Comport Emulation wie z. B. von Etherlogic.
Der Vorteil dieser Client/Server Konfiguration ist, Ort der Empfangsanlage muss nicht Ort der Darstellung und Präsentation des Missionsverlaufs (Kontrollzentrum) sein. So kann eine beliebige günstig gelegene Station zum Empfang der Ballonmission verwendet werden, solange sie über einen Internetanschluss verfügt, mehr noch, es könnten beliebig viele Stationen zum Empfang eingesetzt werden und im Kontrollzentrum alle Empfangsdaten zusammenlaufen.
Diese Idee weiterverfolgt, ermöglicht die automatische Darstellung aller Empfangsstationen auf einer Europakarte, die den Ballon aufnehmen können, die dann im Internet für jedermann abrufbar sein sollte. Dies setzt voraus, dass dieses Programm öffentlich zugänglich gemacht wird und die Anwender den entsprechenden Port in ihrem Netzwerk freizugeben haben.
Wir werden diese interessante Möglichkeit in einer der nächsten Missionen ankündigen und vorbereiten.